주행보조기능은 자율주행을 실현하기 위한 기반이 되고 있습니다.최근 자동차의 첨단 기능이라는 것이 이른바 반자동 운전이라고 불리는 주행 보조 기능입니다. 또한 ‘첨단드라이버 보조 기능(Advanced Driver Assistance System)’의 약자인 ADAS라고도 합니다. 차량 스스로 상황을 판단하고 제어하여 안전하고 쾌적한 운행을 지원하는 보조 장치의 총칭입니다.
특히 다가오는 완전 자율주행 시대를 앞두고 자동차의 인식과 판단, 제어를 보다 섬세하고 자연스럽게 수행하는 주행보조기능의 개발은 미래차 시장을 노리는 자동차 메이커의 최우선 전략 과제의 하나입니다. 주행 보조 기능이 완전히 인간 대용이 되면 그것이 완전 자율주행이 되는 것이니까요.
자동차의 수많은 기능과 마찬가지로 이러한 주행 보조 기능 또한 하루아침에 탄생한 것은 아닙니다. 처음에는 운전자의 제어에만 충실하던 자동차에 더 많은 제어권한을 이양하기 위해서는 수십 년에 걸친 개발자들의 노력과 연구가 있었습니다. 오늘은 자동차 주행 보조 기능의 발전 과정을 살펴보겠습니다.
첫 번째 주행 보조 기능은?

‘주행보조기능’은 어떻게 정의할 수 있을까요?역사를 알기 위해서는 ‘주행 보조 기능’의 정의가 우선입니다. 사실 넓은 의미의 주행 보조 기능은 범위가 매우 애매한 것입니다. 단순히 ‘사람의 판단과 제어를 대신하는 것’이라고 정의하면 자동 변속기도 주행 보조 기능이라고 할 수 있습니다.
그래서 주행보조기능의 개념을 보다 좁게 해석한다면 ‘안전을 위해 운전자의 지각능력이나 반사신경의 한계를 넘어 상황을 인식, 판단해 필요한 기계적 제어를 대신하는 것’이라고 할 수 있습니다. 단순히 귀찮은 일을 대신해 주는 것이 아니라, 자동차가 안전 운전을 돕는 조수가 되면 이해하기 쉬울 것입니다.

ABS는 자동차에 적용된 첫 번째 주행 보조 기능입니다그런 관점에서 보면, 차량에 최초로 도입된 주행 보조 기능은 안티 록 브레이킹 시스템, ABS네요. 급제동시에 드라이버가 반사적으로 브레이크를 강하게 밟아도 바퀴가 잠기지 않고 조향 능력을 유지할 수 있도록 자동으로 브레이크 압력을 제어하는 기능입니다만. 기존 운전자의 역량에 달려있던 안전에 처음으로 자동차의 능동적 판단과 제어가 개입된 사례입니다.
ABS는 원래 비행기나 기차와 같은 대형 운송 수단을 위해 개발되었습니다. 연속 제동을 통해 제동거리를 줄이고 타이어(기차의 경우 바퀴)의 이상 마모를 방지할 목적이었는데. 이것이 1960년대부터 자동차에 도입되기 시작해 1978년 메르세데스 벤츠가 다양한 노면 환경과 코너링 상황에도 정밀하게 대응하는 차량용 전자식 ABS를 상용화하면서 급속히 보편화되었습니다.

ABS에서 발전한 ESP는 오늘 거의 모든 신차의 기본 사양입니다.제동시 브레이크 압력을 능동적으로 제어하는 ABS가 도입된 이후 주행 보조 기능은 점차 범위를 넓혀갑니다. ABS를 응용하여 가속 상황에서의 휠 스핀을 방지하는 트랙션 컨트롤 시스템(TCS)이 탄생하였고, 조향각 센서와 자이로 센서가 차량의 비정상적인 운동 – 언더스티어나 오버스티어를 감지하여 진로 이탈을 방지하는 전자식 자세 제어 시스템(ESP)도 ABS 기술의 연장선상에서 만들어진 것입니다.
이들 장비는 안전을 위해 필요하다고 판단되면 자동차가 제어에 능동적으로 개입한다는 개념을 처음 제시해 수만 명의 목숨을 구한 1세대 주행보조 기능으로 평가할 수 있습니다. 현재 여러 회사가 ABS, TCS, ESP 등의 기능을 기본 사양으로 탑재하고 있어 사실상 의무화되어 그 존재를 잊어버리는 경우가 많지만, 여전히 묵묵히 드라이버의 생명을 지켜가고 있습니다.
21세기 ADAS 발전사

자동차에 전자 제어 기술이 많이 투입되면서 주행 보조 기능은 새로운 국면을 맞이하게 됩니다.1990년대 이후 자동차 산업은 큰 변화를 겪습니다. 정밀 전자 제어 기술이 급속히 발전하면서 자동차의 전장화가 빠르게 이루어지기 시작했습니다. 이전까지는 복잡한 유압이나 공압장치를 사용하여 기계적으로 제어하던 장치가 전자제어시스템으로 대체됩니다.
특히 센서의 고도화는 자동차가 주위 환경을 보다 적극적으로 인지하고 판단할 수 있는 환경을 만들어 줍니다. 처음에 이러한 센서 기능을 활용한 것은 앞 차와의 거리를 유지하는 기능이었습니다. 크루즈 컨트롤 자체는 이미 오래 전부터 상용화되어 있었지만, 이러한 정속 주행 중에 앞의 차가 등장하면 기능을 정지할 수밖에 없었습니다. 정밀한 센서를 활용하면 이런 불편을 없앨 수 있을 것이라는 판단이었습니다.

미츠비시는 1995년, 세계 최초의 차간거리 보조 기능을 상용화했습니다.1992년 미츠비시는 세계에서 처음으로 앞의 차와의 간격을 인식해 운전자에게 알리는 기능을 도입, 1995년 미츠비시·디어만테에 「프리뷰 디스턴스 컨트롤」이라고 하는 기능을 탑재했습니다. 가속 페달과 변속에 의해 크루즈 컨트롤을 하는 동안 앞 차와의 간격을 조절하는 방법이었습니다. 그러나 미츠비시가 채용한 레이저 센서는 인식 범위가 좁고, 악천후 환경에서 인식율이 낮았습니다. 또한 브레이크가 아닌 가속 페달과 변속기만으로 차간 거리를 조절하는 데는 한계가 있었습니다.

W220S-클래스는 세계 최초로 완전 ACC를 탑재한 차량입니다.메르세데스벤츠는 이런 단점을 보완해 레이더 센서를 장착하고 브레이크까지 적극 개입해 차간 거리를 유지하는 현대적인 어댑티브 크루즈 컨트롤(ACC) 디스트로닉을 선보입니다. 이는 최초의 현대적인 ACC 기능으로 20여 년이 지난 오늘날 센서 인식률과 제어의 정확도는 높아졌지만 기본 구조는 대동소이합니다.
게다가 2000년대에 들어와 광학 센서, 즉 카메라가 비약적인 발전을 이루어냅니다. 디지털 이미지 센서의 성능은 높아지고 소형화와 대중화가 가능해져 자동차에도 적극 쓰이게 된 것입니다. 덕분에 기존에는 사람의 눈으로만 인식하던 시각 정보를 자동차도 받아들일 수 있게 되었습니다.
카메라를 활용하는 주행 보조 기능으로는 차선 이탈 경보·방지 시스템과 능동형 긴급 제동 기능이 있습니다. 카메라로 차선을 인식해 앞으로 벗어나면 운전자에게 알려주는 차선이탈경보 기능은 2000년 다임러 트럭이 처음 상용화했습니다. 초기에는 카메라 부피 때문에 대형 트럭에만 사용됐지만 이후 카메라가 소형화되면서 승용차에도 도입됐습니다.

차선 이탈 경보 기능은 이제 능동적으로 조향 보조하는 수준까지 발전했습니다.차량에서 이탈을 감지한다는 것은 다른 제어 기능을 동원하여 이탈을 막을 수 있다는 의미입니다. 차선을 밟으면 반대편 바퀴를 미세하게 제동하여 차로안쪽으로 돌려주는 차선유지보조시스템(LKAS), 처음부터 능동적으로 조향에 개입하고 차로의 중앙을 유지하는 능동형 조향보조시스템으로 발전하여 지금에 이르고 있습니다.

볼보가 처음 도입한 능동형 긴급 제동 기능은 오늘날 많은 신차에 적용됩니다.능동형 긴급제동기능(AEBS)은 레이더 센서와 카메라를 결합해 앞 차량이나 도로를 횡단하는 보행자, 자전거 등을 인식하면 사람보다 빨리 차량이 먼저 제동하는 기능입니다. 2009년 볼보가 시티 세이프티(City Safety)라는 이름으로 처음 상용화됐고, 오늘날에는 카메라 인식률이 높아져 고속 주행 중에도 작동할 수 있도록 진화했습니다.
이 외에도 초음파 센서, 레이저 센서(라이더) 등 외부 환경을 인식하는 센서의 성능은 점차 개선되어 차량의 주행, 제동, 조향 등 대부분의 기능이 전장화되어 다양한 ADAS 기능들이 개발 및 상용화되고 있습니다. 자동차가 거의 모든 순간에 차 주변의 모든 환경을 인식하고 스스로 판단하고 제어할 수 있는 수준에 이르면서 자연스럽게 공상과학 같았던 자율주행차에 대한 논의도 시작됩니다.
자율주행 시대는 오는 건가?

완전 자율주행은 주행 보조 기능의 최종 진화형입니다자율주행기능은 주행보조기능의 최종진화형입니다. 정확히 말하면, 130년 이상 운전의 주체였던 인간이 모빌리티 사용자로 물러나고, 자동차가 주행을 「보조」하는 것이 아니라 주행의 주도권을 잡는 것입니다.
이러한 자율주행 시스템은 지금까지 별도로 개발·도입되어 온 몇 개의 주행 보조 기능이 하나로 통합되지 않으면 완성되지 않습니다. 따라서 각각의 기능이 치밀하게 연동돼 안전하고 자연스럽게 작동해야 하고, 많은 변수가 공존하는 교통환경에 얼마나 유연하게 대응하느냐가 관건입니다.

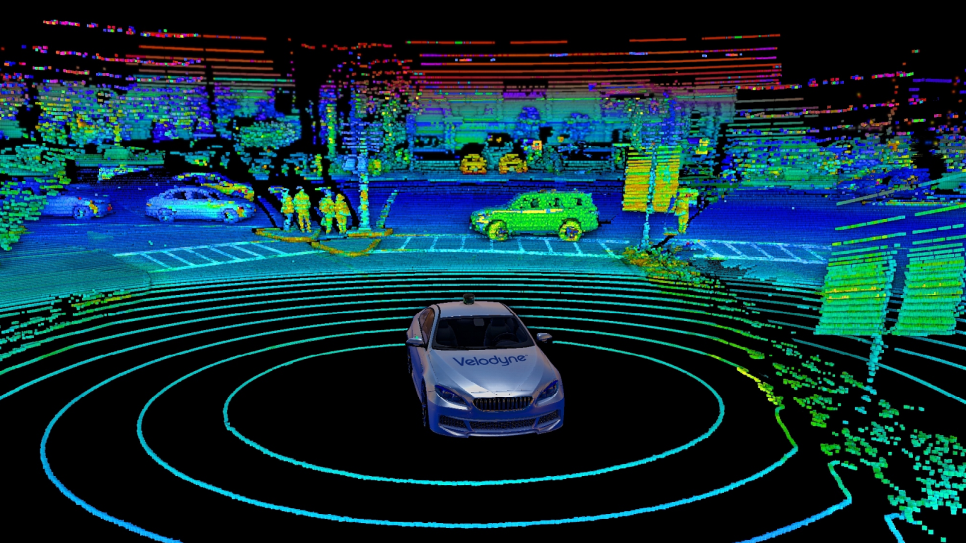
라이더가 인식하는 환경라이더는 자동운전을 실현하기 위한 중심 센서의 하나입니다.자율주행 기능에서는 특히 라이더의 역할이 중요한데 라이더는 레이저의 반사를 통해 주변 환경을 인식하는 센서다. 카메라보다 3차원 공간인식률이 높아 레이더나 초음파센서보다 빠르고 정밀하게 주변 상황을 인식할 수 있습니다. 그러나 비싸고 부피가 큰데다 악천후에 약해 장애물 너머를 인식하는 기능이 떨어집니다.
다른 방식의 센서들도 각각 장단점이 있기 때문에 이상적인 자율주행 시스템은 여러 종류의 센서를 혼용하여 주변을 완벽하게 인식하는 것을 목표로 합니다. 마치 사람이 운전할 때 시각, 청각, 촉각 등 다양한 감각 기관을 활용하듯이 말이죠.

어느 정도 변수가 억제된 환경에서의 자율주행은 이미 기술적으로 가능합니다.실제로 자동차에 사용되는 센서는 이미 인간의 신체 능력 수준을 넘어선 지 오래여서 기술적으로는 이미 완전히 자율주행을 구현할 수 있게 되었습니다. 하지만 아직 휴먼 에러, 악천후, 기타 도로 위에서 겪게 되는 다양한 돌발 상황에 대응하기가 쉽지 않아 보다 완벽한 자율주행 기술을 위한 연구가 계속되고 있는 상황입니다.
최근에는 이러한 기능을 고도화하기 위해 빅데이터와 딥러닝 기술을 사용하는 추세입니다. 과거에는 시스템에 모든 변수의 가능성을 하나하나 입력했다면 지금은 실제 도로주행을 통해서 얻은 데이터를 바탕으로 컴퓨터 시스템이 상황을 판단하고 대응하는 반복훈련을 하는 것이죠. 모든 차량에 이러한 연산 기능을 탑재하기는 어렵기 때문에 딥러닝 방식의 자율주행을 구현하기 위해서는 실시간으로 가까운 시일 내에 서버와 통신할 수 있는 인프라가 요구됩니다.
물론 이러한 기술적 어려움 외에도 자율주전의 완성을 위해서는 넘어야 할 산이 많습니다. 자율주행에 대한 법적, 윤리적 문제, 사회적 인식 등 많은 것들을 해결해야 합니다(이 부분에 대해서는 다음 번에 별도로 설명해 드리겠습니다). 따라서 운전자의 개념이 사라지는 완전 자율주행의 시대를 맞이하기 위해서는 앞으로도 몇 년 이상의 연구가 필요합니다.

자동운전의 입구까지 발전한 주행 보조 기능의 진화에 경의를 표합니다.하지만 이것과는 별개로 인간의 한계를 보완하고 더 안전한 도로를 만들기 위해 탄생한 주행 보조 기능이 수십 년 만에 인간을 대체하는 수준까지 올라간 것을 보고 빠르게 발전하는 기술에 새삼 경의를 표했습니다. 분명한 것은 이런 기능들이 있기에 차가 더 편리하고 안전할 수 있었다는 것이죠. 새로운 변혁을 앞둔 주행 보조 기능이 향후 어떻게 진화할 것인지 기대합니다.
지음 이재욱 에디터 ‘피카몰 매거진’

www.pcarmall.com “내가 그의 이름을 불렀을 때 그는 나에게로 와서 꽃이 되었다. “시의 한 구절처럼 이름은… “blog.naver.com” 자동차 관련 뉴스는 듣기 거북한 소식만 난무하는 요즘입니다. 차량용 반도체 공급난으로 신차 출고가 1년… blog.naver.com 오늘날 세계적으로 가장 인기있는 자동차는 독일 차이지만 사실 유럽 각국의 자동차 산업은 물론입니다. 차량용 반도체 공급난으로 신차 출고가 1년… blog.naver.com 오늘날 전세계적으로 가장 인기있는 자동차는 독일 차이지만 사실 유럽 각국의 자동차 산업은 없었다.