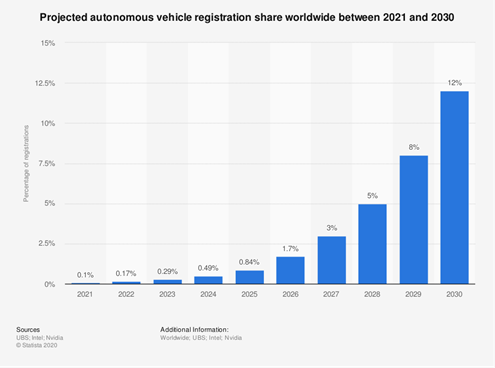
얼마 전에 QSI를 분석해 자율주행 시장에 대해 이야기를 했는데 오늘은 그 이야기를 좀 더 자세히 해보려고 한다.
자율주행이란 운전자의 조작 없이도 차가 자동으로 주행할 수 있다는 의미다.
미국 자동차기술학회 기준으로 자율주행에는 총 0부터 5단계까지 있는데 아래 표와 같다.자동화 단계의 특징 내용 Level0 비자율 운전자가 모든 동적 주행, 조작을 제어 Level1 운전자 지원 자동차가 조향 지원 시스템 또는 가속/감속 지원 시스템에 의해 실행되는데, 사람이 자동차의 동적 주행에 대한 모든 기능을 수행 Level2 부분 자동화 자동차가 조향 지원 시스템 또는 가속/감속 지원 시스템에 의해 실행되는데, 주행 환경 모니터링은 사람이 수행하고 안전 운전 책임도 운전자가 부담 Level3 조건부 자동화 시스템이 운전 조작의 모든 측면을 제어하는데, 시스템이 운전자의 개입을 적절히 제어해야 하며, 그에 따른 책임을 운전자가 담당해야 한다.Level5 완전자동화의 모든 도로 조건과 환경에서 시스템이 항상 주행담당(사람이 일체 조작하지 않음)을 정리하면 이 정도지만 현재 벤츠는 독일 정부로부터 자율주행 3단계 인증을 받았다. 물론 독일 정부의 기준이기 때문에 아직 미국 기준에 부합한 것은 아니지만 미국에서도 인증을 받기 위해 계속 테스트 중이어서 조만간 미국에서도 인증을 받을 것으로 본다.
테슬라가 자율주행에서 당연히 1위라고 생각했던 사람들은 놀랐을 것이다. 벤츠는 그냥 고급차를 잘 만드는 기업이 아닌가 싶지만 사실 이 자율주행 개념을 벤츠가 처음 제시하며 꾸준히 연구개발을 주도해왔다.(여담으로 차에 들어가는 대부분의 안전기술은 벤츠와 볼보가 개발했다고 해도 과언이 아니다.)
어쨌든 자율주행은 오래전부터 학회와 기업이 긴밀히 연결돼 기술을 발전시켜 왔기 때문에 논문을 보는 것보다 현재 출시된 차량의 자율주행 탑재 동향과 하드웨어(라이다, 레이더, 카메라) 탑재 개수와 장착 위치를 파악하는 것이 훨씬 도움이 된다.
그래서 자율주행 Level3가 적용된 벤츠 차량을 한번 보면서 어디까지 발전했는지 살펴본다.
사진 출처 : [시승기] 직접 타본 벤츠 EQS 자율주행 레벨3… ‘핸들 없는 인생은 아직 멀었다’ – 모터그래프(motorgraph.com) 사진에서 보이는 저 빨간 네모를 보면 라이더가 적용됐음을 알 수 있다. 기존 자율주행차는 360도 라이다가 적용됐지만 역시 멋지지 않아 저렇게 라이다를 낮춘 모습을 알 수 있다. 자세히 보면 라이더가 장착된 부분이 움푹 들어간 모습을 볼 수 있는데 저건 라이더 특성상 레이저를 쏴야 하기 때문에 어쩔 수 없이 판 것이다.(레이더와 카메라는 암만 봐도 너무 작아서 표시할 수 없었다.)
이렇게 되면 측방과 후방을 탐지할 수 없지만 벤츠에서는 이를 카메라와 레이더로 보완하겠다는 답안을 제시했다.
이렇게라도 라이다를 넣은 걸 보면 어쨌든 자율주행으로 운전자의 안전을 95% 이상 보장하기 위해서는 라이다, 레이더, 카메라 세 가지가 무조건 사용돼야 한다는 답을 벤츠가 내린 것 같다.
마찬가지로 혼다의 2025년까지 만들 예정이라는 자동차 디자인을 보면 레이더, 라이다, 카메라 등 3대가 모두 탑재돼 있다. 결국 3개의 하드웨어 중 1개를 포기할 수 있는 단계는 아니라는 얘기가 될 것이다. 이는 다른 완성차 업체들도 마찬가지다. 테슬라 빼고.

사진 출처 : 혼다자동차, 2025년 ‘레벨4’ 자율주행차 개발 – 로봇신문사(irobotnews.com) 테슬라는 완성차 기업의 움직임과 달리 카메라와 레이더만으로 완전한 자율주행 기술을 구현할 수 있다고 주장하고 있으며, 이 이론을 바탕으로 인공지능 기술을 개발해 적용해 판매하고 있다.
하지만 인공지능이 훈련이 미흡해서인지 계속 사고가 속출하고 있어 인공지능 판단에 운전을 맡기다 보니 결국 사람이 한다느니 인공지능이 한다느니 별 차이가 없어졌다….테슬라 사고로 숨진 애플 개발자, ‘자율주행 모드에서 스마트폰 게임 중 충돌’ – 조선일보(chosun.com)
테슬라는 카메라로 사물을 인식해 인공지능에 판단을 내리는 것과 레이더가 다르지 않다고 주장하지만 내 생각은 크게 다르다.
우선 소프트웨어 기술로는 결국 하드웨어를 넘어설 수 없다. 휴대전화 카메라와 DSLR 카메라를 비교 사례로 들어보면 휴대전화 카메라가 아무리 발전했더라도 결국 초고화질 사진을 찍으려면 DSLR의 힘을 빌려야 한다. 왜냐하면 카메라는 이미지 센서(하드웨어)에서 화질이 크게 갈리기 때문이다.
또 가상 메모리와 RAM에서도 사례를 들 수 있다. 소프트웨어 기술로 지원하는 가상 메모리와 RAM은 같은 메모리지만 결국 실제 존재하는 RAM의 속도를 절대 따라잡을 수 없다.
이렇게 가상으로 구현한 것이 실물 속도를 따라잡는 것은 거의 불가능에 가깝다고 보면 된다. 기술 발전 속도가 추월당하지 않는 한 말이다.
결국 라이더로 정확한 거리를 측정하는 것과 소프트웨어로 추측하는 것의 정확도를 비교하면 라이더가 무조건 압승할 수밖에 없다. 테슬라가 주장한 것은 현재는 말도 안 되는 얘기일 뿐이다. 테슬라가 주장한 것이 실현되려면 라이더의 발전 속도보다 인공지능 학습 및 판단 능력을 얻는 속도가 압도적으로 빨라야 하지만 현실은 라이더다. 발전속도가 더 빨라…
게다가 인공지능 판단은 하드웨어가 제공하는 정보에 의존할 수밖에 없다. 결국 위 내용과 연결되는 내용이긴 하지만 인공지능이 판단하기 위해서는 많은 정보가 필요하다. 사람은 무의식적인 감각으로 무수한 정보를 밀리초 단위로 받아들이고 처리하지만 인공지능에 감각기관이 되어주는 하드웨어의 수가 부족하면 결국 인공지능의 판단 정확도는 떨어질 수밖에 없다.
결국 사람이 하는 것보다 못하는 일이 있다는 얘기다.
마지막으로 라이다의 공정기술, 개발기술 발달로 라이다의 단가가 계속 떨어지고 있다는 점도 테슬라가 라이다를 배제하고 자율주행을 하는 의미를 퇴색시킨다. 라이더가 비싸다는 이유로 라이더를 배제한 것인데 라이더가 싸지면 굳이 그럴 이유가 없기 때문이다.
따라서 내 개인적인 생각으로는 다수의 완성차 기업들이 밀고 있는 방식(라이더)이다.+ 레이더+카메라)가 자율주행 시장을 주도할 것으로 보이며, 이 방법은 인공지능이 고도화되지 않는 한 계속 유지될 것으로 보인다. 인공지능이 고도화돼도 안전상의 이유로 무조건 3가지를 다 탑재할 것 같은데.
적외선 센서는 현재 적용하려는 완성차 업체도 없어 향후 적용될 가능성이 낮다는 생각이 든다. 왜냐하면 라이다와 레이더 기술로도 충분히 야간 자율주행이 가능하기 때문이다. 물론 악천후에서는 연구가 진행 중이긴 하지만 이 역시 매핑 기술을 발달시키는 방향으로 가닥을 잡은 것 같다.적외선 센서까지 적용하기에는 단가가 너무 안 맞는 것 같아.
따라서 적외선 센서 기업이 혜택을 받기는 조금 어려울 것으로 보인다. 투자를 하려면 라이다나 레이더, 카메라 제조업체(특히 LG이노텍)에 투자하는 게 옳은 선택인 것 같다.탱고픽에서도 개미라는 이름으로 활동하고 있기 때문에 내용이 너무 길어서 읽기 어려운 사람들은 탱고픽에 올린 요약본을 보자! (탱고픽에서 내 투자 포트폴리오 종목과 비중도 확인할 수 있다.)
탱고픽 다운로드 링크 : https://bit.ly/2ZkR0dK 알파브리지(Alpha Bridge)는 현재 투자시장의 문제점을 진단하고 투자의 합리성에 대한 신뢰를 바탕으로 많은 사람이 펀드를 쉽고 편리하게 참여할 수 있는 투자 플랫폼을 만듭니다.bit.ly