‘자율주행 기술이 운전자 과실로 인한 사고를 90% 이상 줄일 수 있다’는 전망이 마냥 장밋빛으로 그치지 않으려면 자율주행차 상용화는 반드시 안전도 확보가 전제돼야 한다. 국민의 재산과 생명을 보호하기 위한 안전성 확보는 결코 타협 대상이 되지 않기 때문이다. 자율주행자동차의 현행 안전기준과 향후 추진방향에 대해 알아보고자 한다.
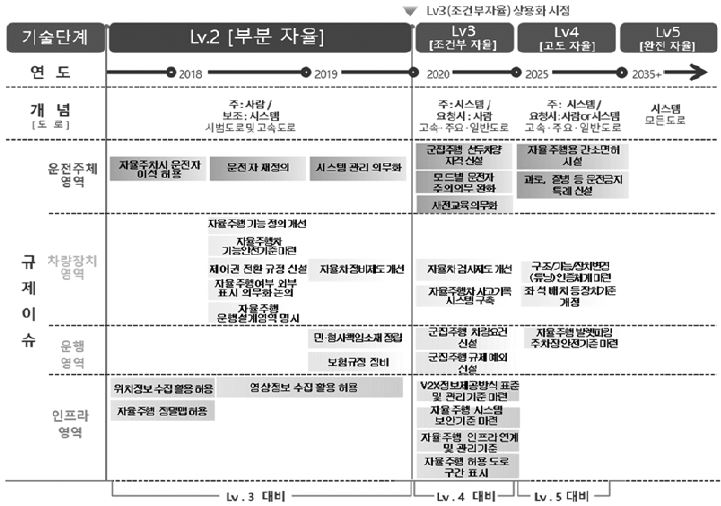
자율주행자동차 및 자율주행 기술 수준의 정의 자율주행자동차의 안전에 대해 말하기 전에 먼저 자율주행자동차의 구조 및 특징을 충분히 이해해야 한다. 즉 기존 자동차와의 차이점을 확실히 알아야 하고 동시에 자율주행차의 기술 수준을 충분히 숙지해야 한다.’자율주행자동차’란 운전자가 직접 제어하지 않고 자동차 내부에 탑재된 장치가 자동차 외부 신호 등과 연계해 현재 자동차의 상태나 주변 환경 등을 인지·판단하고 자동차를 능동적으로 수정 또는 제어해 정해진 경로를 추종하거나 설정된 목표 지점에 도달할 수 있도록 하기 위한 기술을 적용한 자동차를 말한다. 즉 인간이 인지하고 판단하고 제어하던 기존 자동차 운전을 기계(시스템)가 스스로 하는 자동차를 말한다. 또 자율주행자동차는 특정 자율주행 기술 수준을 갖춘 자동차를 의미한다. 자율주행차의 성능과 안전을 확인하기 위해서는 해당 자동차에 장착된 자율주행 시스템의 수준을 일정한 잣대로 평가하기 위한 기준이 필요한데 이때 필요한 것이 자율주행 기술 수준이다.현재 양산되는 자동차에 장착된 자율주행 기술은 대부분 레벨2 수준이다. 레벨3 이상 자율주행 기술은 개발이 진행되고 있을 뿐 아직 공식적으로 양산 단계까지 도달하지 못한 상황이다. 또 레벨5 자율주행차는 운영 설계 영역이 무제한이어서 단기간 실현이 불가능하다. 따라서 현재 기술개발 및 안전성 확보의 주요 타깃은 레벨 3과 레벨 4이다. 특히 레벨 3은 제어권 전환 시 안전도 확보 문제, 그리고 레벨 4는 운행 설계 영역에서 시스템이 전적으로 책임지고 있기 때문에 이에 대한 안전이 먼저 확보되어야 할 것이다.

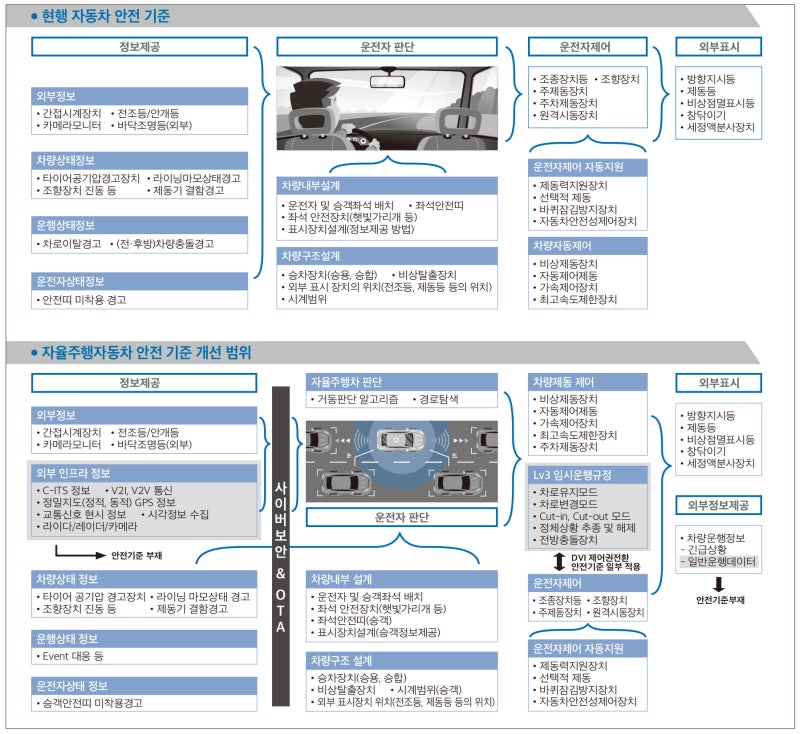
자율주행차 안전기준 패러다임 변화 자율주행차는 전통적인 자동차 성능평가와는 다른 패러다임을 갖고 있다. 우선 운전자의 영역이 인간에서 시스템으로 전환된 것이다. 기존에 운전은 사람이 하고 그에 대한 책임을 지도록 했지만 지금은 시스템이 운전하기 때문에 시스템의 운전능력에 대한 검증이 필요한 것이다.또 자율주행 레벨 3~4는 운행 설계 영역(Operational Design Domain, ODD)과 연계해 해당 영역 내에서만 작동한다. 따라서 기존 주행시험장에서 모든 운행설계 영역을 담당할 수는 없다. 즉 지리적으로 ODD를 이탈해 다른 기술적 ODD 기준을 반영한 평가가 불가능하고 또 자동차에 내장된 고정밀 지도도 없다. 따라서 새로운 평가 방법을 도출해야 한다. 즉, 실도로 시험 또는 시뮬레이션 등 새로운 평가 방법을 추가해야 한다.이에 따라 국제자동차안전기준 제·개정을 담당하는 UNECE/WP.29에서는 자율주행자동차 안전기준 개발을 위해 <그림3>와 같은 평가방법을 적용하기로 했다.즉 자율주행차는 기존 주행시험장 평가방법과 실도로 평가방법이 필요하다. 또한 시뮬레이션 및 가상장치 평가 및 제작사의 자기선언 등을 확인하는 적합성 평가 등 복합적 평가방법이 필요하며, 현재 이에 대한 기준 논의가 진행되고 있다.

▲자율주행자동차의 현재 안전기준=현재 모든 자동차의 안전기준은 UNECEWP.29에서 만들고 있으며 자율주행자동차는 GRVA라는 분과에서 논의하고 있다. 그 아래 전문 기술 분과로 자동차 기능 기술 기준과 자동차 검증 방법, 사이버 보안, OTA(Over the Air, 무선 소프트웨어 업데이트), 그리고 자율주행 데이터 저장 시스템에 대한 기준을 만드는 분과가 있다. 주로 유럽이 주도하고 있으며, 일본과 중국, 그리고 한국 등이 기준 제정에 활발하게 참여하고 있다. 한국에서는 자동차안전연구원이 대표적인 역할을 하고 있다.
<그림 5>는 레벨 3 자율주행차 운행의 경우 발생 가능한 시나리오를 구성한 플로우 차트다. 신규 제정된 레벨3 자율주행차 안전기준에 대해 간략히 설명하면 다음과 같다. 먼저 차선유지 기능을 사용할 때 안전기준으로 주행안전 확보를 위해 감지성능에 따른 최고속도 및 앞 차량과의 최소 안전거리가 제시돼 있다. 또 이상 상황 시 상황별 제어권 전환에 대한 기준, 긴급한 상황의 경우에는 비상운행 기준에 따라 최대한 감속 및 비상조향으로 대응하는 기준이 있어 이미 지난 7월 1일부터 적용하고 있다.
특히 제어권 전환과 관련해 운전전환 요구를 한 때부터 10초 이내에 운전자 대응이 없으면 그 이후부터 위험 최소화 운행을 자동으로 시작해야 하며 운전전환 요구 경고는 시각·청각, 시각·청각·촉각 중 선택해 사용해야 하며 운전전환 요구 후 4초 이내에 경고신호를 늘리기 시작해야 하며 운전자가 운전조작을 하거나 위험 최소화 운행이 시작되면 운전전환 요구를 중지해야 한다.또 운전자 모니터링 시스템은 운전자의 착석 여부, 안전벨트 착용 여부, 운전자의 운전조작 가능 여부를 항상 감지할 수 있어야 한다. 이에 따른 감지 등의 기준은 별도로 제정되어 있다.아래는 자율주행정보기록장치(Data Storage System for Automated Driving, DSAD)에 관한 내용이다. 이 장치는 자율주행차 사고 발생 시 신속한 피해자 보호 및 구제를 위해 사고 원인과 책임 소재 판단 기준이 되는 자율주행 시스템 작동 여부 등을 기록하는 장치다. 운행주체가 누구인지, 문제가 있는지 등 책임소재 등을 판단하기 위해 필요한 시스템으로 자율주행시스템 작동 및 해제, 운전전환 요구, 운전자 조작입력, 비상운행 개시 및 종료, 임박한 충돌위험 감지, 운행정보기록 시점, 충돌인지, 위험 최소화 운행개시, 시스템 및 차량의 심각한 고장 등 사고책임 관련 항목과 내용을 저장하도록 돼 있다. 이 장치는 상기 사건에 대한 날짜, 시간(±1.0초) 정확도 및 최소 6개월 이상의 발생 기록 또는 2,500건 이상의 기록이 가능해야 하며, 자율주행정보기록장치에 저장된 정보는 적어도 표준화된 인터페이스(OBD 포트)를 통한 통신 인터페이스를 사용하는 표준화된 방식으로 읽힐 수 있도록 하여야 한다. 또 의무 장착하도록 돼 있다.
향후 안전기준 추진방향에 대해 다양한 추진내용이 있는데, 여기에서는 중요한 두 가지 사항에 대해 논의하기로 하자. 우선 첫째, 위에서 언급한 시뮬레이션, 주행시험장 및 실도로 평가 등에 필요한 시스템의 자율주행 평가 시나리오 개발이 시급하다. 이를 위해 WP.29에서도 별도의 전문가 그룹을 구성해 논의하고 있다. <그림 6>은 복수의 도로조건, 차량조건 및 교통상황까지 고려하여 논의된 평가 시나리오의 예이다.
다음은 갈수록 중요성이 강조되는 사이버 보안에 관한 내용이다. 2020년 6월 25일 유엔이 발표한 보도자료에 따르면 유엔 유럽경제위원회(United Nations Economic Commission for Europe, UNECE)의 차량규제 국제조화를 위한 세계포럼(WP.29)에서는 사이버보안과 무선업데이트에 관한 새로운 유엔기준을 채택했다. 이 기준은 2021년 1월부터 법규로 발효 예정이며 유예기간을 거쳐 2022년 7월부터는 신규 자동차(New Type Vehicle), 2024년 7월부터는 모든 양산차(New Vehicle)에 적용하기로 했다.특히 자동차 사이버보안은 현재 보안취약성에 대한 대책을 구현하더라도 기술발달과 함께 새로운 취약성이 나타나는데 이를 고려한 보안대책이 지속적으로 수립돼야 한다.이러한 배경에서 차량의 사이버 보안은 <그림 7>과 같이 두 가지 개념으로 평가해야 한다. 첫째, 자동차 라이프사이클에 대한 제조사의 사이버 보안 관리 능력(즉 사이버 보안 관리 시스템)을 평가한다. 즉, 보안관리시스템(Cyber Security Management System, CSMS)에 초점을 맞추어 제작사의 조직구조, 프로세스 및 거버넌스에 대한 사이버보안 요구사항을 확인한다. 둘째, 실차에 적용된 보안 대책을 평가한다. 차량을 실제 테스트하고 차량 아키텍처 설계, 위험 평가 절차 및 사이버 보안 제어 구현이 올바르게 실행되었는지 확인하면서 보다 구체적으로 차량에 대한 형식 승인을 한다.또 사이버보안 평가를 위해 기준(Regulation)에서는 프로세스 체크와 차량 평가를 수행해야 한다고 밝히고 있지만, 어떻게 심사(Audit)하고 평가할지에 대한 구체적인 내용은 없다. 물론 유엔에서도 해석서를 마련하고 있지만 관련 표준(예:ISO/SAE 21434)을 참조하도록 명기하고 있는 바 OEM(완성차업체)은 이러한 표준을 사용해 규정 원칙이 어떻게 충족되는지 보여줄 수 있어야 한다.
끝으로 자율주행차가 가져다주는 달콤한 혜택은 안전성이 보장된 상태에서만 누릴 수 있는 것이다. 기술은 타협할 수 있지만 안전은 타협 대상이 아니라는 점을 충분히 인식해야 한다. 유엔도 자율주행에 대한 정의를 수립하고 안전성 확보를 위한 기준 제정을 위해 본격적으로 나서고 있다. 우리도 자율주행차 안전성 확보를 위한 안전기준 제·개정에 보다 적극 대응해야 할 것으로 판단된다.
자율주행차가 가져다주는 달콤한 혜택은 안전성이 보장된 상태에서만 누릴 수 있다. 기술은 타협할 수 있지만 안전은 양보하거나 타협의 대상이 아니다. 유엔에서는 자율주행에 대한 정의를 수립하고 안전성 확보를 위한 기준 제정을 본격화하고 있다. 우리도 자율주행차 안전성 확보를 위한 안전기준 제·개정에 보다 적극 나서야 한다.”
글 : 신재곤 연구단장 / 한국교통안전공단 자동차안전연구원 출처 : 한국교통연구원 월간교통