자율주행차의 원리
기뻐요
덕업 일치를 목표로 하는 블로그
칼리지널이에요.
미래의 자동차는 과연 어떤 모습으로 우리에게 다가올까요?
하늘을 나는 자동차를 상상하고 바다를 건너는 자동차도 상상하지만,
무엇보다 피부에 다가온 것은 자율주행차입니다.

이번 포스팅에서는 요즘 뜨거운 이슈로 떠오르고 있는 주제입니다.
자동차 회사는 물론 IT회사와 통신사, 심지어 유통업체까지 경쟁에 뛰어드는
자율주행차의 원리에 대해 포스팅해보려고 합니다.

과연 어떤 원리로 주행을 할지
과연 안심하고 맡겨도 될지
기술은 지금 어디까지 왔는지
자율주행 자동차의 원리를 큰 틀에서 조사합니다.
자, 시작하겠습니다.
자율주행자동차 원리의 핵심은 크게 세 가지로 나눌 수 있습니다.
- 인지
- ‘인지’는 주행 시의 도로 상황을 차 스스로가 인지하는 것을 말합니다.
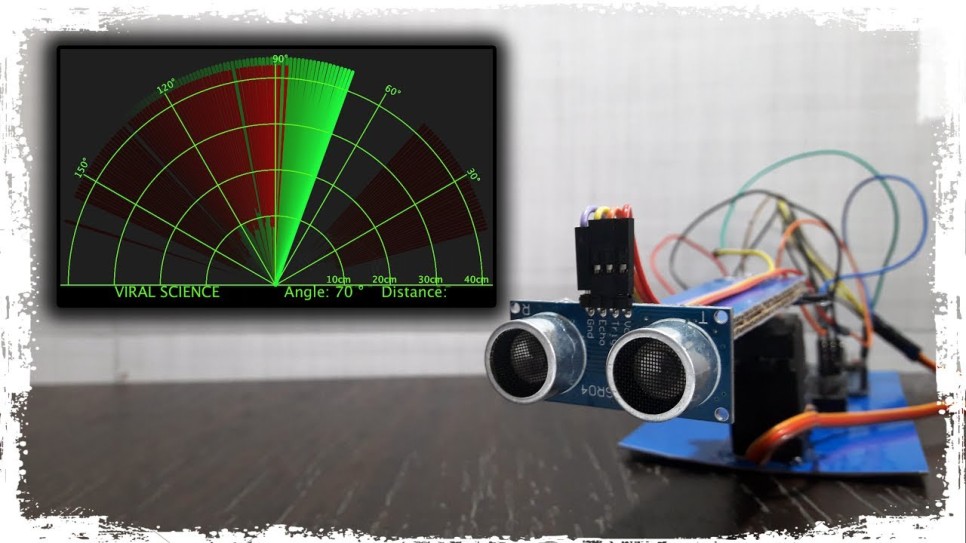
- 이를 이행하기 위해서는 검지장치, 즉 센서가 필요한데
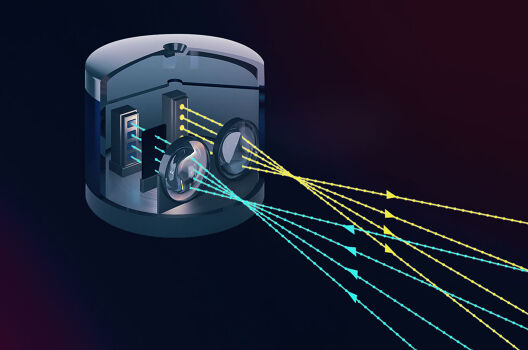
- 그 주된 역할을 하는 것이 라이더입니다.
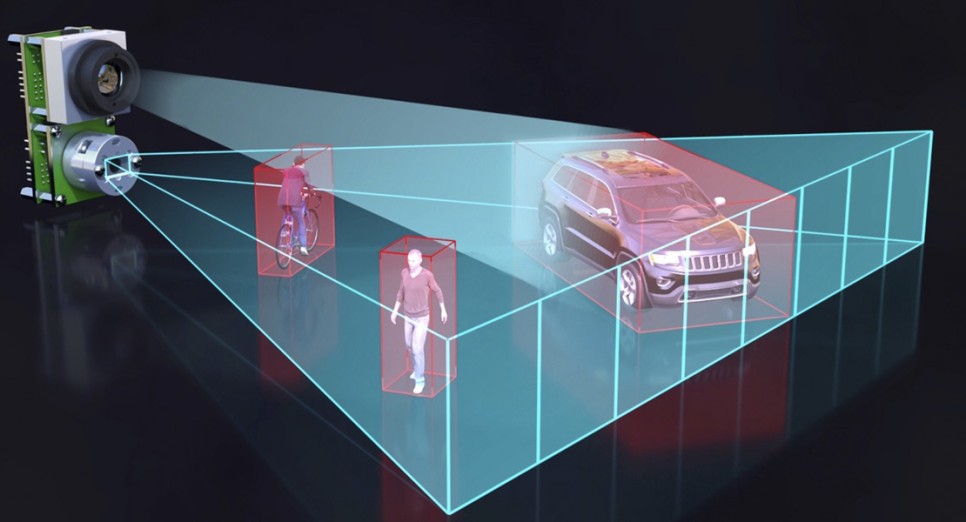
라이더는 레이저를 이용하여 앞쪽 사물의 형태 및 원근감을 인지시키는 센서로
레이더와 카메라가 인식할 수 없는 세세한 부분까지 구분하여 사용하는 장치입니다.
자율주행자동차의 원리에 따른 핵심사항이라고도 할 수 있습니다.
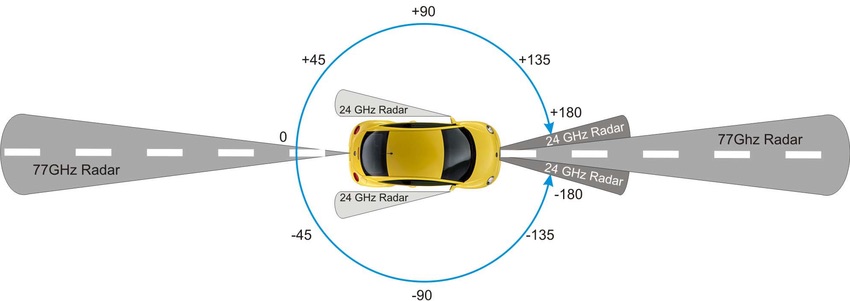
라이더와 레이더의 차이점을 좀 얘기해 볼게요.
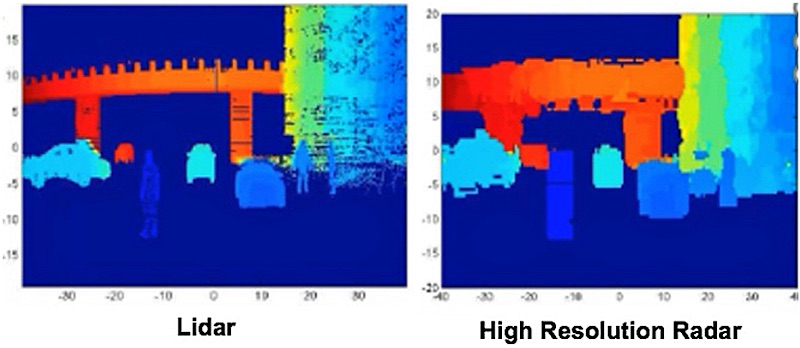

주변 사물을 인식하기 위해서는 레이더에는 단층 전자파를 사용합니다.
그래서 인식하는 영역은 좁았다가 제한적이 되기도 합니다.
예를 들어 자율주행 자동차에 설치된 레이더가 앞을 향하고 있는 경우,
바닥에 붙어있는 작은 물체는 인식할 수 없는 형식입니다.

심지어 레이더는 결과치를 보낼 때 움직이는 것만 계산합니다
센싱된 결과값중 움직이지 않는 것은 제외하는 형식입니다.
이유는 여러가지가 있지만
가장 큰 것은 프로세싱 한계 때문에 효율성을 극대화하기 위함입니다.
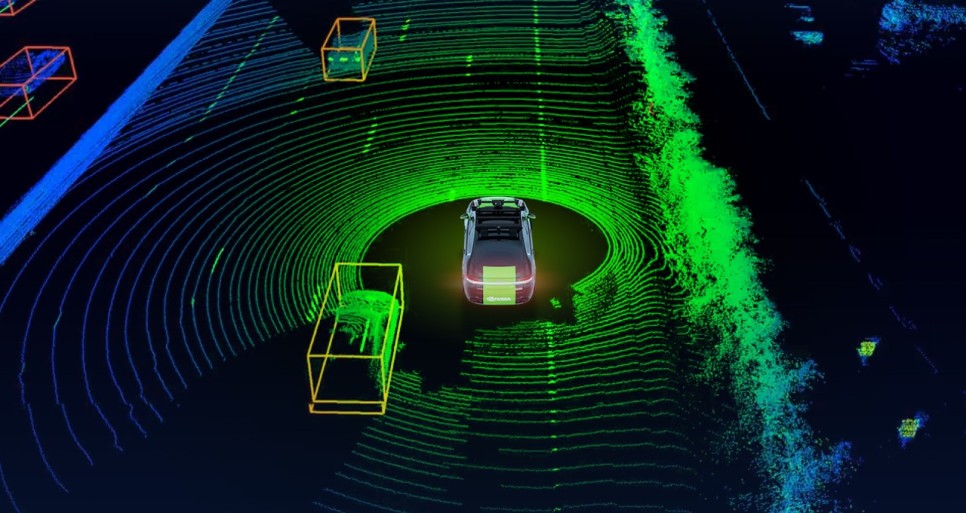
하지만 라이다는 달라요.우선 단층이 아니라 16 층의 레이저를 사용하여 360도 주변의 것을 인식합니다.
게다가 움직이는 것이든 정지해 있는 것이든 모두 계산하여 결과값을 도출합니다.
단층 레이어 구성 레이더 대비 16층 레이어를 사용하기 때문에
정확도로 16배 정확한 거라고 생각하시면 될 것 같습니다.
하지만 라이더는 레이더에 비해 가격이 매우 비싸다는 단점이 있습니다(라이더 센서에 관한 좀 더 정확한 이야기는 추후 따로 포스팅 할 예정입니다.)
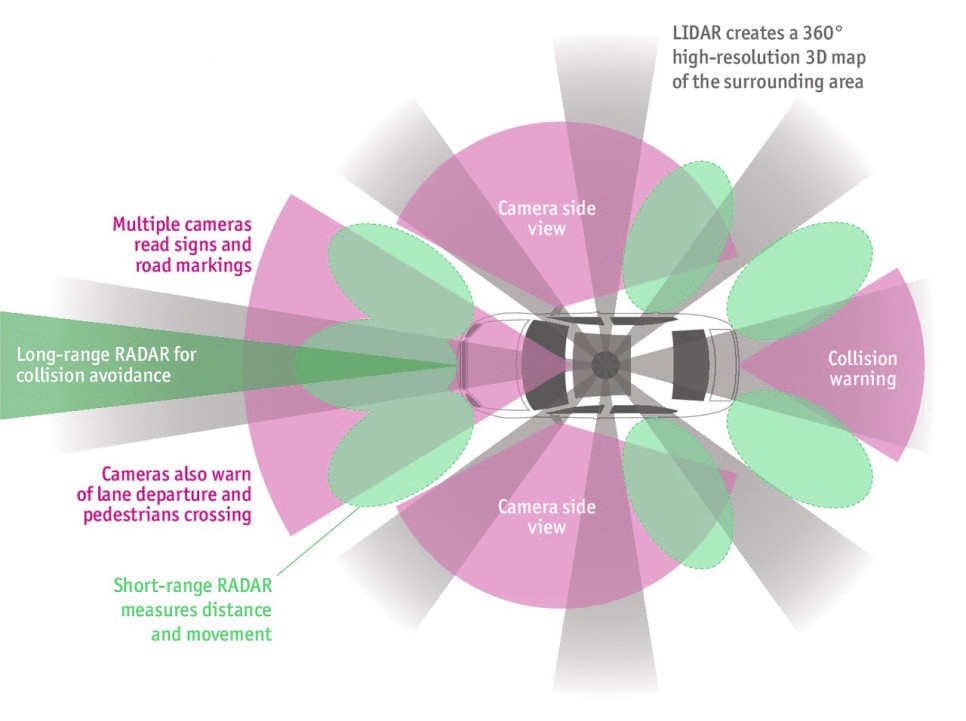
큰 틀에서 보면 레이더가 전방물의 유무를 판단하고 라이더가 물건의 구체적인 모양을 잡으면
그 결과 값을 제어영역인 AI에 전송하여 인과 사물을 구분하는 원리입니다.
결국 라이더 센서를 중심으로 레이더와 카메라가 보조해 주는 형태로 이해하면 간단합니다.

2. 제어
자율 주행 자동차 원리의 실행 영역에 해당하는 것이 제어입니다.
앞에서말한인지영역의센서가열심히주변의물건과전방의지형을숫자로계산하면
각 인지 영역에서 송신된 센서의 결과값을 컴퓨터 AI가 대입·해석하여
스티어링 휠과 브레이크, 엑셀레이터 등을 제어하여 주행과 정지, 회전을 판단하여
실행하는 것입니다.

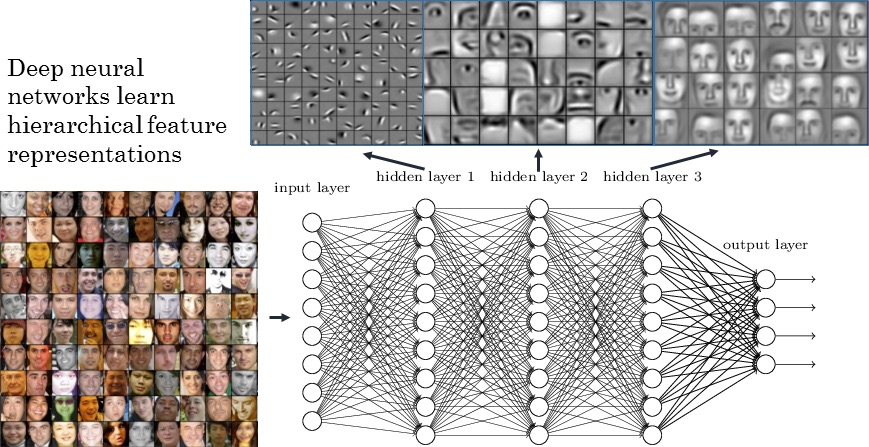
그래서 AI에게 학습된 데이터 양이 얼마나 되는지 AI 컴퓨팅의 속도 유무가
자율주행자동차의수준을결정짓는가장중요한요소가되는거죠.
하지만 여기서는 학습이 매우 중요하고 동시에 해결하기 어려운 부분입니다.
자동차 운행이라는 건 예측에서 기내에서 오는 수많은 변수들의 연장선입니다.
특히 자율주행자동차라고 하면 더욱 그렇습니다.
예를 들어 주행 중에 앞차가 급정거를 하거나 야생동물이 튀어나오는 경우 등에 있어서
해당 사건이 사전에 학습되어 있으면 문제가 없지만,
학습이 되어 있지 않으면, 아무런 대응도 할 수 없는 채 사고로 이어집니다.
최근 미국 고속도로에서 전복된 트럭을 오토 파일럿으로 주행한 테슬라 군이 충돌한 사건도 같은 맥락이라고 할 수 있습니다.
고속도로상에서 뒤집힌 트럭이라는 변수가 학습되지 않은 상태였기 때문입니다.
그래서 딥러닝 기술의 발전 속도와 자율주행차 수준의 상승은 비례한다고도 할 수 있겠네요.
하지만 아직 인간에 가까운 Ai 딥러닝이 이루어지지 않았기 때문에
이것을 보조할 수 있는 유일한 요소가 필요한데, 그것이 바로 측위 영역입니다.
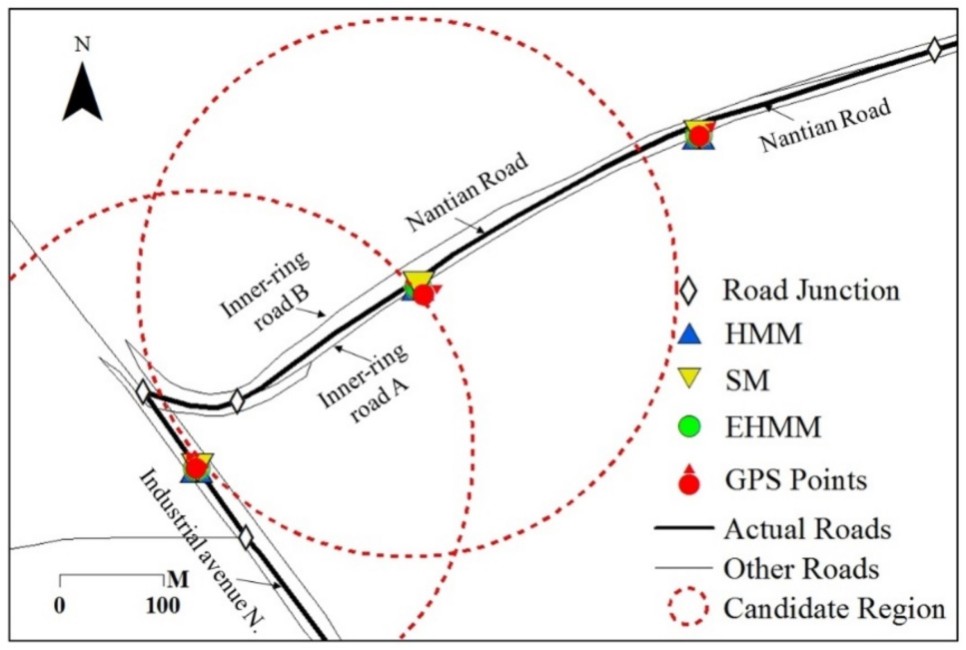
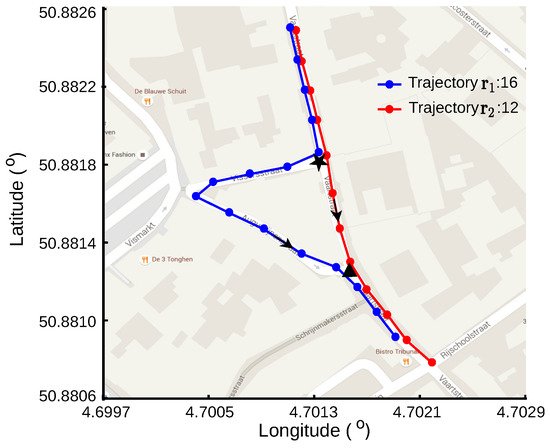
3. 측위
현재의 시점에서 자동차의 자동 운전은 측위를 반드시 필요로 하고 있습니다.
측위란, 지도 정확하게는 gps위치를 가리킵니다.